Commande d'un servo

1. Description
Dans ce tuto, nous allons montrer comment commander un servo par modulation de largeur d'impulsion, à l'aide d'une carte Arduino.
La programmation sera nettement simplifiée par l'utilisation d'une bibliothèque toute faite fournie avec le logiciel de programmation
de la carte Arduino (servo.h).
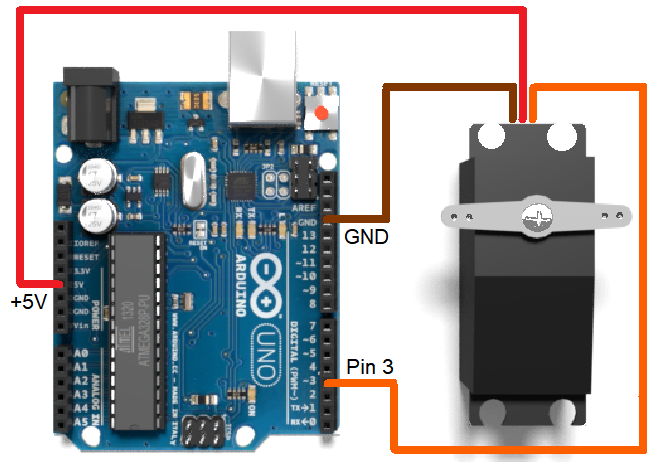
2. Câblage de la carte Arduino
3. Programme
#include <Servo.h> // Chargement de la bibliothèque.
int pinServo = 3; // Première sortie disponible possédant un ~ (sortie pwm).
int angle = 0; // Initialisation de l'angle de rotation du servo à 0.
Servo servo; // Constructeur : définit un objet servo pour l'utilisation de la bibliothèque.
void setup()
{
// L'objet servo est attaché à la broche 3.
servo.attach(pinServo);
}
void loop()
{
// variation de l'angle de 0 à 180 degrès.
for(angle = 0; angle < 180; angle++)
{
servo.write(angle);
delay(15);
}
// variation de l'angle de 180 à 0 degrès.
for(angle = 180; angle > 0; angle--)
{
servo.write(angle);
delay(5);
}
}